Tracking the Movement of Cyborg Cockroaches
New research from North Carolina State University offers insights into how far and how fast cyborg cockroaches – or biobots – move when exploring new spaces. The work moves researchers closer to their goal of using biobots to explore collapsed buildings and other spaces in order to identify survivors.
NC State researchers have developed cockroach biobots that can be remotely controlled and carry technology that may be used to map disaster areas and identify survivors in the wake of a calamity.
For this technology to become viable, the researchers needed to answer fundamental questions about how and where the biobots move in unfamiliar territory. Two forthcoming papers address those questions.
The first paper answers questions about whether biobot technology can accurately determine how and whether biobots are moving.
The researchers followed biobot movements visually and compared their actual motion to the motion being reported by the biobot’s inertial measurement units. The study found that the biobot technology was a reliable indicator of how the biobots were moving.
The second paper addresses bigger questions: How far will the biobots travel? How fast? Are biobots more efficient at exploring space when allowed to move without guidance? Or can remote-control commands expedite the process?
These questions are important because the answers could help researchers determine how many biobots they may need to introduce to an area in order to explore it effectively in a given amount of time.
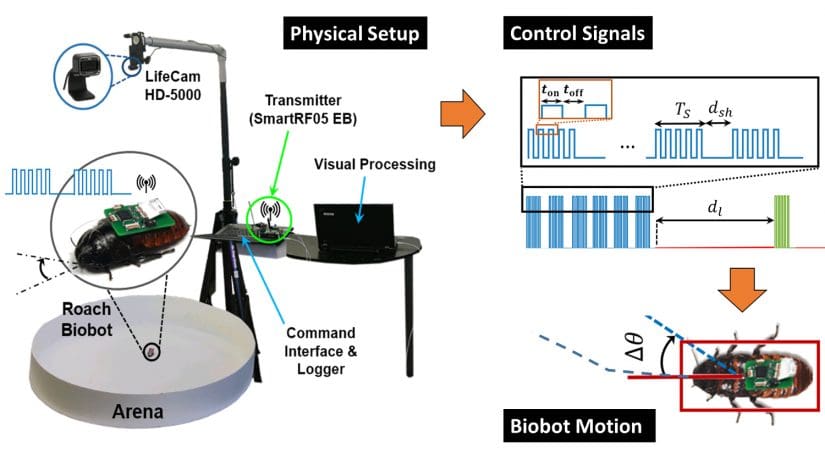
For this study, researchers introduced biobots into a circular structure. Some biobots were allowed to move at will, while others were given random commands to move forward, left or right.
Related Video: Biobotic Motion
The researchers found that unguided biobots preferred to hug the wall of the circle. But by sending the biobots random commands, the biobots spent more time moving, moved more quickly and were at least five times more likely to move away from the wall and into open space.
“Our earlier studies had shown that we can use neural stimulation to control the direction of a roach and make it go from one point to another,” says Alper Bozkurt, an associate professor of electrical and computer engineering at NC State and co-author of the two papers. “This [second] study shows that by randomly stimulating the roaches we can benefit from their natural walking and instincts to search an unknown area. Their electronic backpacks can initiate these pulses without us seeing where the roaches are and let them autonomously scan a region.”
“This is practical information we can use to get biobots to explore a space more quickly,” says Edgar Lobaton, an assistant professor of electrical and computer engineering at NC State and co-author on the two papers. “That’s especially important when you consider that time is of the essence when you are trying to save lives after a disaster.”
Lead author of the first paper, “A Study on Motion Mode Identification for Cyborg Roaches,” is NC State Ph.D. student Jeremy Cole. The paper was co-authored by Ph.D. student Farrokh Mohammadzadeh, undergraduate Christopher Bollinger, former Ph.D. student Tahmid Latif, Bozkurt and Lobaton.
Lead author of the second paper, “Biobotic Motion and Behavior Analysis in Response to Directional Neurostimulation,” is former NC State Ph.D. student Alireza Dirafzoon. The paper was co-authored by Latif, former Ph.D. student Fengyuan Gong, professor of electrical and computer engineering Mihail Sichitiu, Bozkurt and Lobaton.
Both papers will be presented at the 42nd IEEE International Conference on Acoustics, Speech and Signal Processing, being held March 5-9 in New Orleans.
The work was done with support from the National Science Foundation under grant 1239243.
-shipman-
Note to Editors: The study abstracts follow.
“A Study on Motion Mode Identification for Cyborg Roaches”
Authors: Jeremy Cole, Farrokh Mohammadzadeh, Christopher Bollinger, Tahmid Latif, Alper Bozkurt and Edgar Lobaton, North Carolina State University
Presented: March 5-9, 42nd IEEE International Conference on Acoustics, Speech and Signal Processing
Abstract: This paper demonstrates the ability to accurately detect the movement state of Madagascar hissing cockroaches equipped with a custom board containing a five degree of freedom inertial measurement unit. The cockroach moves freely through an unobstructed arena while wirelessly transmitting its accelerometer and gyroscope data. Multiple window sizes, features, and classifiers are assessed. An in-depth analysis of the classification results is performed to better understand the strengths and weaknesses of the classifier and feature set. The conclusions of this study show promise for future work on cockroach motion mode identification and localization.
“Biobotic Motion and Behavior Analysis in Response to Directional Neurostimulation”
Authors: Alireza Dirafzoon, Tahmid Latif, Fengyuan Gong, Mihail Sichitiu, Alper Bozkurt and Edgar Lobaton, North Carolina State University
Presented: March 5-9, 42nd IEEE International Conference on Acoustics, Speech and Signal Processing
Abstract: This paper presents preliminary results for motion behavior analysis of Madagascar hissing cockroach biobots subject to stochastic and periodic neurostimulation pulses corresponding to randomly applied right and left turn, and move forward commands. We present our experimental setup and propose an unguided search strategy based stimulation profile designed for exploration of unknown environments. We study a probabilistic motion model fitted to the trajectories of biobots, perturbed from their natural motion by the stimulation pulses. Furthermore, we provide a statistical assessment of the biobotic directional response to turn commands and its correlation with stimuli profile over time. This study paves the way towards reliable control for more realistic under-rubble search and rescue applications.